
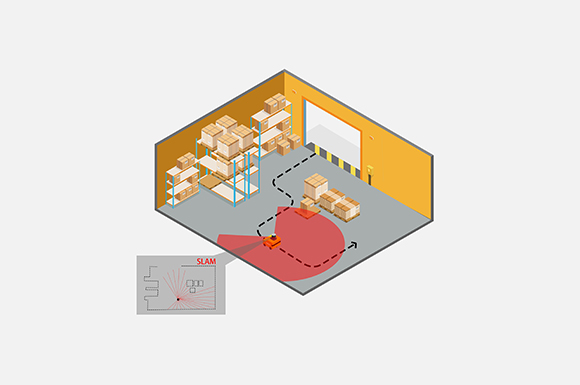
Simultaneous localization and mapping
In the large scene working environment, the laser radar is used to scan the surrounding environment, and the slam map creation algorithm is used to create the map, and the motion track of the car is planned, so that the car can identify the path and move independently. Using slam map creation, the location of the car can be determined to plan the route.


